来源:内容由半导体行业观察(ID:icbank)
编译自IEEE
,谢谢。
一辆自动驾驶汽车
需要做很多事情才能
取得成绩
,但毫无疑问,感知和了解其环境是最关键的。自动驾驶汽车必须跟踪和识别许多物体和目标,无论它们是清晰可见还是隐藏,无论天气好坏。
但
仅用今天的雷达
还远远不足以完成整个工作——我们还需要
摄像头
和
激光雷达。
但是,如果我们能够充分利用雷达的特殊优势,我们可能会省去至少一些辅助传感器。
立体模式下的传统摄像头确实可以检测物体、测量它们的距离并估计它们的速度,但它们不具备完全自动驾驶所需的精度。此外,相机在夜间、雾中或阳光直射下都无法正常工作,使用它们的系统很容易
被视
错觉
所欺骗
。激光扫描系统或激光雷达确实提供自己的指导,因此在恶劣天气下通常优于相机。但尽管如此,他们也只能在清晰的视线中看到前方,因此在被建筑物或其他障碍物遮挡的情况下,将无法检测到接近十字路口的汽车。
雷达在距离精度和角度分辨率方面比激光雷达差——这是两个不同目标之间分辨一个目标所需的最小到达角。但我们设计了一种新颖的雷达架构,克服了这些缺陷,使其在增强激光雷达和摄像头方面更加有效。
我们提出的架构采用了所谓的稀疏、大口径多波段雷达。基本思想是使用各种频率,利用每个频率的特定属性,将系统从天气的变迁中解脱出来,并通过和绕过角落。反过来,该系统采用先进的信号处理和
传感器融合
算法来生成环境的集成表示。
我们已经通过实验验证了我们雷达系统的理论性能极限——它的范围、角分辨率和精度。目前,我们正在为各种汽车制造商构建硬件以供评估,最近的道路测试已经成功。我们计划在 2022 年初进行更精细的测试,以展示转角感应。
每个频段
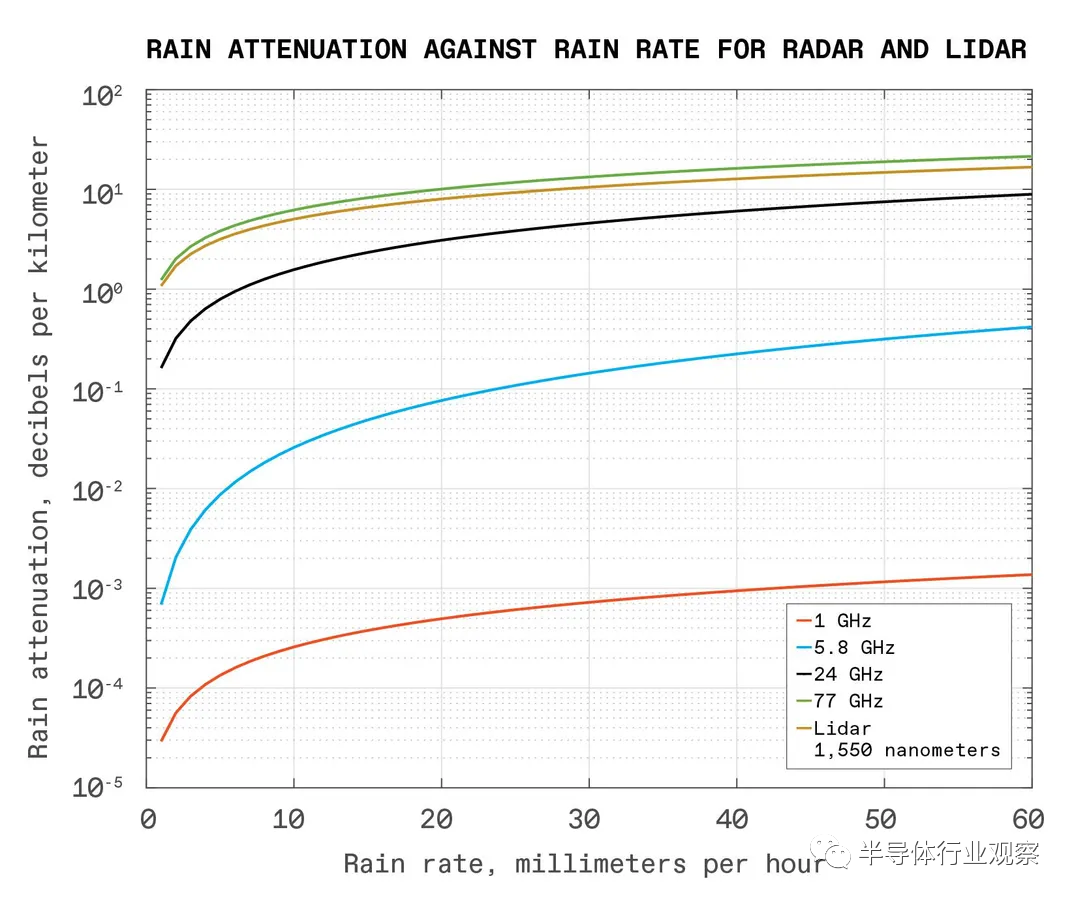
都有其优点和缺点。77 GHz 及以下的频段可以通过 1,000 米的浓雾,而不会损失超过一分贝的信号强度。相比之下,激光雷达和摄像头在 50 米的雾中损失 10 到 15 分贝。
然而,雨是另一回事。即使是小阵雨也会让77 GHz 雷达像激光雷达一样衰减 。没问题,因为你可能会想——去较低的频率就行。毕竟,在 1 GHz 或更低的频率下,雨对雷达来说是透明的。
这可行,但您也需要高频段,因为低频段提供较差的范围和角度分辨率。尽管您不一定将高频与窄波束等同起来,但您可以使用天线阵列或高度定向天线,将毫米长的波投射到窄波束中的较高频带中,就像激光一样。这意味着该雷达可以与激光雷达系统竞争,尽管它仍然会受到同样无法看到视线之外的影响。
对于给定尺寸的天线——即给定阵列孔径——波束的角分辨率与工作频率成反比。类似地,为了实现给定的角分辨率,所需的频率与天线尺寸成反比。因此,例如,要在相对较低的 UHF 频率(0.3 至 1 GHz)下从雷达系统获得所需的角分辨率,您需要一个天线阵列,该天线阵列是雷达运行所需天线阵列的数十倍。K(18 至 27 GHz)或 W(75 至 110 GHz)频段。
尽管较低的频率对分辨率没有多大帮助,但它们带来了其他优势。电磁波倾向于在锋利的边缘衍射;当它们遇到曲面时,它们会在它们周围以“爬行”波的形式衍射。这些影响太弱,无法在 K 波段的较高频率下有效,尤其是 W 波段,但它们在 UHF 和 C(4 至 8 GHz)波段中可能很明显。这种衍射行为以及较低的穿透损耗使此类雷达能够检测 拐角处的物体。
多路径反射和穿过建筑物的传输允许自动驾驶车辆 [红色圆圈,在每个图表的右侧] 在 0.45 秒左右开始检测第二辆车 [红色矩形,每个图表的底部],此时第二辆车仍然存在被左下角的建筑物牢牢地挡住了。由于反射和多路径,两个频段都会产生“幽灵目标”[蓝色圆圈],因此系统采用贝叶斯算法来确定真实目标并去除幽灵。该算法结合了光线追踪和 UHF 和 C 波段的结果随时间的融合。
雷达的一个弱点是它遵循许多路径,在往返被跟踪物体的途中会反射无数物体。由于道路上存在许多其他汽车雷达,这些雷达回波变得更加复杂。但这种缠结也带来了一种力量:范围广泛的弹跳可以为计算机提供有关沿视线投射的光束无法到达的地方发生的情况的信息——例如,揭示直接探测时无法看到的交叉路口。
远看细节——从侧面看,甚至直接穿过障碍物——是雷达尚未完全实现的承诺。没有一个雷达频段可以做到这一切,但是一个可以在多个频段同时运行的系统可以非常接近。例如,K 和 W 等高频段可以提供高分辨率,并且可以准确估计目标的位置和速度。但它们无法穿透建筑物的墙壁或看到角落;更重要的是,它们容易受到大雨、大雾和灰尘的影响。
UHF 和 C 等较低频段不太容易受到这些问题的影响,但它们需要更大的天线元件并且可用带宽更少,这会降低距离分辨率——区分具有相似方位但不同范围的两个物体的能力。对于给定的角分辨率,这些较低的频带还需要大孔径。通过将这些不同的频段组合在一起,我们可以平衡一个频段的弱点与其他频段的优势。
不同的目标对我们的多频段解决方案提出了不同的挑战。汽车前部对 UHF 波段的雷达横截面或有效反射率比对 C 和 K 波段的要小。这意味着使用 C 和 K 波段将更容易检测到正在靠近的汽车。此外,与在 C 和 K 波段相比,在 UHF 波段,行人的横截面在他或她的方向和步态变化方面表现出的变化要小得多。这意味着人们将更容易被 UHF 雷达探测到。
此外,当散射体表面有水时,物体的雷达横截面会减小。这减少了在 C 和 K 波段测量的雷达反射,尽管这种现象不会显着影响 UHF 雷达。
另一个重要的区别在于较低频率的信号可以穿透墙壁并穿过建筑物,而较高频率的信号则不能。例如,考虑一堵 30 厘米厚的混凝土墙。雷达波穿过墙壁而不是从墙壁反射的能力是波长、入射场的偏振和入射角的函数。对于 UHF 频段,在大范围的入射角上,传输系数约为 –6.5 dB。对于 C 和 K 频段,该值分别降至 –35 dB 和 –150 dB,这意味着只有很少的能量可以通过。
如前所述,
雷达的角分辨率与使用的波长成正比。
但它也与孔径的宽度成反比,或者对于天线的线性阵列,与阵列的物理长度成反比。这就是为什么毫米波(例如 W 和 K 波段)可以很好地用于自动驾驶的原因之一。基于两个 77-GHz 收发器、孔径为 6 cm 的商用雷达单元可为您提供大约 2.5 度的角分辨率,比典型的激光雷达系统差一个数量级以上,对于自动驾驶来说太少了。在 77 GHz 下实现激光雷达标准分辨率需要更大的孔径——例如 1.2 米,大约是汽车的宽度。
除了范围和角度分辨率外,汽车的雷达系统还必须跟踪大量目标,有时同时跟踪数百个目标。如果目标与汽车的距离仅相差几米,则可能很难按距离区分目标。对于任何给定的范围,一个均匀的线性阵列(其发射和接收元件等距分布)只能区分与其拥有的天线数量一样多的目标。在可能有大量目标的杂乱环境中,这似乎表明需要数百个这样的发射器和接收器,而需要非常大的孔径会使问题变得更糟。这么多硬件将是昂贵的。
解决这个问题的一种方法是使用一个数组,其中元素只放置在它们通常占据的几个位置。如果我们仔细设计这样一个“稀疏”数组,使每个相互的几何距离都是唯一的,我们可以使它的行为与非稀疏的全尺寸数组一样好。例如,如果我们从一个在 K 波段工作的 1.2 米孔径雷达开始,并放入一个设计合理的稀疏阵列,它只有 12 个发射元件和 16 个接收元件,它的行为就像一个有 192 个元件的标准阵列。原因是精心设计的稀疏阵列在每个发射器和接收器之间可以有高达 12 × 16 或 192 的成对距离。使用 12 种不同的信号传输,16 个接收天线将接收 192 个信号。由于每个发射/接收对之间的唯一成对距离,可以使生成的 192 个接收信号表现得好像它们是由 192 个元素的非稀疏数组接收的。因此,稀疏阵列允许人们用时间换取空间——即使用天线元件进行信号传输。
雷达通常比基于光的传感器(尤其是激光雷达)更容易在雨中看到。在相对较低的频率下,雷达信号的强度损失要低几个数量级。
原则上,
沿汽车上的假想阵列放置的单独雷达单元应作为更大孔径的单个相控阵单元运行。然而,该方案需要单独子阵的每个发射天线联合传输,以及联合子阵的每个天线单元收集的数据的联合处理,这反过来又要求所有子阵单元的相位为完美同步。
这一切都不容易。但即使可以实现,这样一个完美同步的分布式雷达的性能仍然远远低于精心设计的、完全集成的、大口径稀疏阵列的性能。
考虑两个 77 GHz 的雷达系统,每个雷达系统的孔径长度为 1.2 米,具有 12 个发射元件和 16 个接收元件。第一个是精心设计的稀疏数组;第二个将两个 14 元素标准阵列放置在孔径的最末端。两个系统具有相同的孔径和相同数量的天线元件。但是,尽管集成的稀疏设计无论在哪里扫描都表现同样出色,但分离的版本很难从阵列的前面直视前方。那是因为两束天线相距很远,在中心产生了一个盲点。
在广泛分离的场景中,我们假设两种情况。首先,分体系统两端的两个标准雷达阵列不知何故完美同步。这种安排在 45% 的时间里无法检测到物体。在第二种情况下,我们假设每个阵列独立运行,然后将它们各自独立检测到的对象融合在一起。这种安排几乎 60% 的时间都失败了。相比之下,精心设计的稀疏数组失败的可能性微乎其微。
卡车和汽车配备了作者公司 Neural Propulsion Systems 的大口径多波段雷达。请注意卡车挡风玻璃上方非常宽的天线。
在模拟中可以很容易地描绘出拐角处的景象
。
我们考虑了一辆配备了我们的系统的自动驾驶汽车,靠近一个有四栋高层混凝土建筑的城市十字路口,每个角落都有一座。在模拟开始时,车辆距离十字路口中心 35 米,第二辆车正通过交叉路口接近中心。接近的车辆不在自动驾驶车辆的视线范围内,因此如果没有看到拐角处的方法就无法检测到。
在三个频段中的每一个频段,雷达系统都可以估计视线内目标的范围和方位。在这种情况下,目标的射程等于光速乘以发射的电磁波返回雷达所需时间的一半。目标的方位角由雷达接收到的波前的入射角确定。但是当目标不在视线范围内并且信号沿多条路径返回时,这些方法不能直接测量目标的距离或位置。
但是,我们可以 推断目标的范围和位置。首先,我们需要区分视线、多路径和穿过建筑物的返回。对于给定的范围,多径返回通常较弱(由于多次反射)并且具有不同的极化。通过建筑物的回报也较弱。如果我们知道基本环境——建筑物和其他静止物体的位置——我们可以构建一个框架来找到真实目标的可能位置。然后,我们使用该框架来估计目标在这个或那个位置的可能性。
随着自动驾驶汽车和各种目标的移动以及雷达收集到更多数据,每条新证据都用于更新概率。这是贝叶斯逻辑,从它在医学诊断中的使用中很熟悉。病人有发烧吗?如果有,是否有皮疹?在这里,每次汽车系统更新估计值时,它都会缩小可能性范围,直到最终显示真实目标位置并且“幽灵目标”消失。通过融合从多个频段获得的信息,可以显着提高系统的性能。
我们使用实验和数值模拟来评估我们的雷达系统在各种操作条件下的理论性能极限。道路测试证实雷达可以检测到来自遮挡的信号。在接下来的几个月里,我们计划展示圆角感应。
我们的系统在范围、角度分辨率和在拐角处看到的能力方面的性能应该是前所未有的。我们希望它能够实现一种比我们所知道的更安全的驾驶方式。
*免责声明:本文由作者原创。文章内容系作者个人观点,半导体行业观察转载仅为了传达一种不同的观点,不代表半导体行业观察对该观点赞同或支持,如果有任何异议,欢迎联系半导体行业观察。
今天是《半导体行业观察》为您分享的第2931内容,欢迎关注。
『
半导体第一垂直媒体
』
实时 专业 原创 深度
识别二维码
,回复下方关键词,阅读更多
晶圆|集成电路|设备
|汽车芯片|存储|台积电|AI|封装
回复
投稿
,看《如何成为“半导体行业观察”的一员 》
回复
搜索
,还能轻松找到其他你感兴趣的文章!