来源:内容由半导体行业观察(ID:icbank)
编译自Yole
,谢谢。
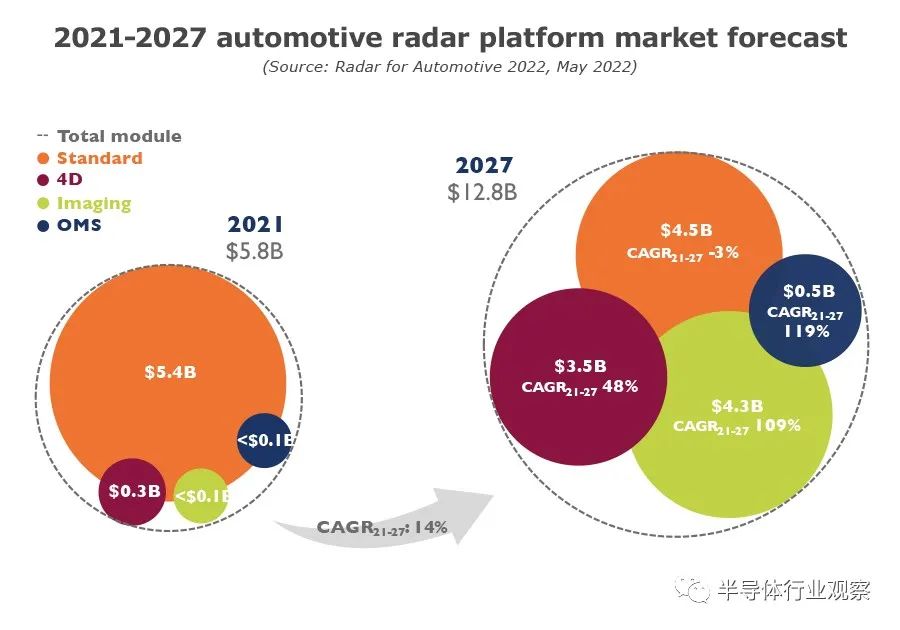
据市场分析机构Yole透露,不断发展的安全法规和新颖的驾驶自动化功能正在推动雷达市场。
他们指出,总体而言,2021 年雷达平台市场为58亿美元。根据他们的预计,其未来几年的复合年增长率将高达14%,那就意味着到 2027 年,整体市场规模将达到 128亿美元。这一市场增长主要来自 4D 和成像雷达,这将更好地适应未来更严格的驾驶场景.
Yole同时指出,雷达传感器也有望在更普遍的情况下进入室内监控用例市场,例如儿童存在检测和占用监控系统。这种新型雷达传感器预计将带来新的市场机会。据Yole预计,到2027 年这个市场将达到近 5 亿美元。
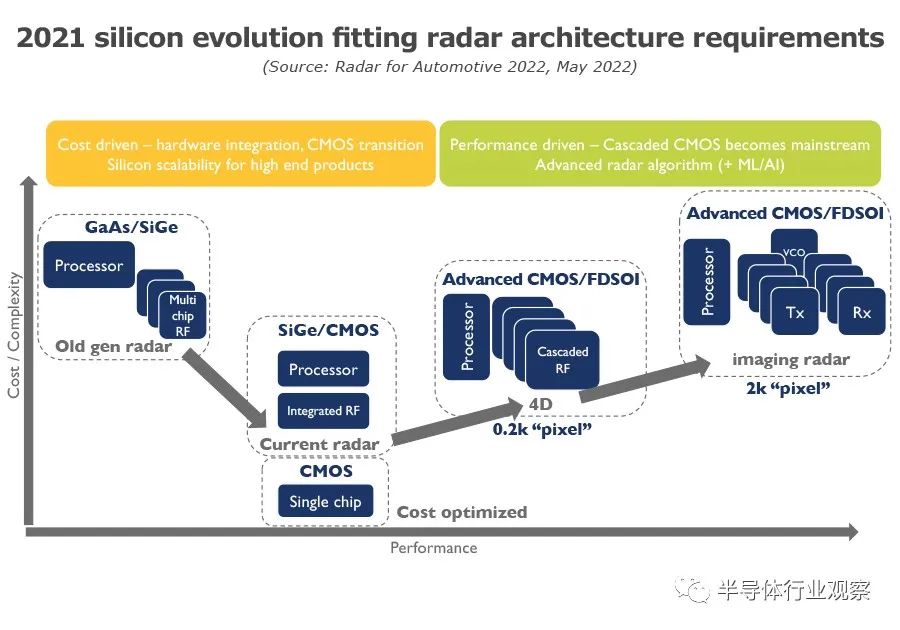
Yole表示,第一个商用汽车雷达于 2000 年为戴姆勒和宝马汽车推出。在 2020 年和 2021 年期间,领先的雷达供应商推出了他们的第 5 代雷达。现代汽车雷达传感器继承自这个长期的进化周期。到目前为止,升级主要集中在成本和外形优化上,这说明了行业所追求的集成化趋势。
除了集成之外,RF 性能随着时间的推移显着提高。最初,雷达以模拟波束形成和机械转向运行,然后转向数字波束形成(全场景照明)。在数字波束形成时代,引入了 MIMO 技术,可以在保持合理物理尺寸的同时增加天线虚拟孔径。
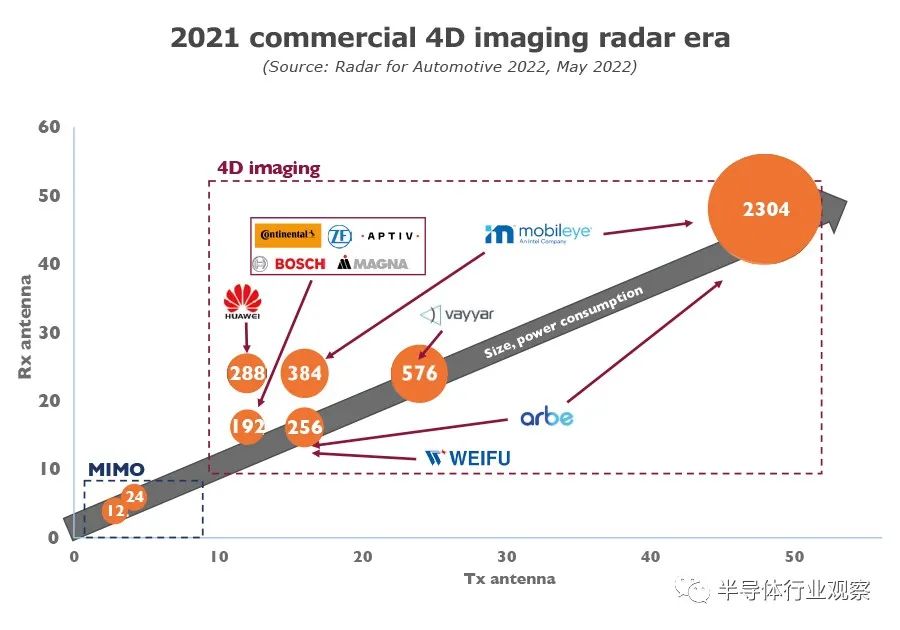
目前,业界提出了 MIMO 缩放(从 0. 2k 到 2k 像素)作为实现成像雷达低于 1° 角分辨率的基线。这带来了信号处理和计算方面需要克服的新挑战,这解释了为什么重点转向深度学习和人工智能。
在系统层面,市场由六大一级供应商引领:Continental、Bosch、Hella、Denso、Aptiv 和 Veoneer。同时,在芯片层面,恩智浦和英飞凌占据了大部分市场。尽管雷达市场已经成熟多年,但我们看到多个新玩家定位并获得设计胜利,无论是在系统级别(Magna、Mobis、Weifu 等)还是在芯片级别(例如,Arbe、Uhnder、Vayyar )。而且还有更多,因为大型科技公司也在投资雷达开发(当中包括华为、高通和英特尔……)。
寻求新收入来源并渴望差异化以求生存的 OEM 热衷于与这些公司直接讨论,将其传统供应商列入候选名单。这给领先的一级供应商和半导体公司带来了巨大压力,他们需要比通常的时间周期更快地进行创新。因此,领先企业正在寻求协同效应,要么进行整合,要么转向垂直整合。
从如今的技术来看,要实现完全自动驾驶依然有所难度,但是作为主动防护汽车驾驶安全的高级驾驶辅助系统(Advanced Driver Assistance Systems,简称ADAS)正在逐渐成熟和普及,毫米波雷达就是汽车ADAS不可或缺的核心传感器之一。
在这个车企们追求高级别自动驾驶的时代,毫米波雷达市场渗透率也在逐渐攀升。Yole Développement数据显示,全球毫米波雷达市场规模预计将由2019年的205亿美元增长至2025年的280 亿美元,年复合增长率为5%;其中,车载毫米波雷达市场规模预计将由2019年的55亿美元增长至 2025年的105亿美元,年复合增长率达到11 %。
从20世纪60年代至今,经历了几十年的发展,传统的毫米波雷达毫无疑问已经是一项十分成熟的技术,然而过于成熟的技术却限制了它的突破性创新,且在一定程度上固化了其市场格局,这也是毫米波雷达话题性不如激光雷达的原因之一。激光雷达作为一项新兴技术,无法预知的未来也正是它的魅力所在,蕴藏着无限可能。
此外,相比激光雷达的高探测精度以及较强的3D环境感知能力,毫米波雷达在面向L3及以上级别的自动驾驶功能中的短板也十分明显。传统毫米波雷达还停留在距离和方位的2D平面感知,缺少高度这个维度的感知,并且存在无法高密度点云成像,不能有效地解析目标的轮廓与类别、水平角分辨率低、难以检测横穿目标以及难以检测静止目标等技术局限。
具体来说,由于传统车载毫米波雷达的天线只在二维方向上排列,使得其只可测量水平坐标 (X,Y),同时依靠多普勒效应可以测量物体的速度信息,最终只可输出(X,Y,V)三个指标。
从X轴看,传统毫米波雷达横向分辨率低,也就是上述说到的水平角分辨率低。横向分辨率是指左右两个扫描的激光点形成的夹角,夹角度数越小,横向分辨率越高,和激光雷达相比,毫米波雷达的横向分辨率不具备优势。
而从Y轴看,传统毫米波雷达则在测高能力上有所欠缺。由于不具备测高能力,传统毫米波雷达难以判断前方静止物体是在地面还是在空中,井盖、减速带等“地面低小障碍物”以及交通标识牌、龙门架、立交桥等“空中障碍物”, 在它的“眼”里都是在地面这一平面上,在这种情况下,如果不把他们反射的信号全部过滤掉,毫米波雷达无疑就会发出前方有障碍的错误预警,造成“幽灵刹车”。然而,当桥梁、路牌下有静止的车辆、三角锥桶等“路面上较大障碍物”,毫米波雷达也会因为误判导致交通事故发生。
特斯拉在2016年时发生的那场自动驾驶车祸,起因就是因为特斯拉摄像头感知失效,无法识别出前方停下的货车,而毫米波雷达作为备用传感器,本应该识别出前方障碍物发出预警,只可惜事实并非如此,最终造成惨剧的发生。
因此,综合来看,毫米波雷达要想再次占据自动驾驶三件套中的“C位”,升级4D感知势在必行,4D成像毫米波雷达也就此诞生。
★ 点击文末
【阅读原文】
,可查看本文原文链接!
*免责声明:本文由作者原创。文章内容系作者个人观点,半导体行业观察转载仅为了传达一种不同的观点,不代表半导体行业观察对该观点赞同或支持,如果有任何异议,欢迎联系半导体行业观察。
今天是《半导体行业观察》为您分享的第3033内容,欢迎关注。
『
半导体第一垂直媒体
』
实时 专业 原创 深度
识别二维码
,回复下方关键词,阅读更多
晶圆|集成电路|设备
|汽车芯片|存储|台积电|AI|封装
回复
投稿
,看《如何成为“半导体行业观察”的一员 》
回复
搜索
,还能轻松找到其他你感兴趣的文章!